|
Kejie Li
I am a PhD student working with Ian Reid at the University of Adelaide.
I am also affiliated with Australian Centre for Robotic Vision (ACRV) for my PhD research.
I received my Bachelor of Advanced Computing (Honours) at the Australian National University supervised by Stephen Gould.
Prior to that, I did my Bacholor of Computer Science at Shandong University, China.
My research focuses on geometry reconstruction (e.g., depth and object shape) from RGB image(s) using deep learning.
I am particularly interested in "semantic aware" SLAM system.
Email /
CV /
Google Scholar /
LinkedIn
|

|
News
Feb 2020: One paper accepted to CVPR 2020.
Sep 2019: I will join Facebook Reality Lab in Seattle for an internship.
Jul 2019: One paper accepted to BMVC 2019 as oral presentation.
Jul 2018: One paper accepted to ECCV 2018.
Feb 2018: One paper accepted to CVPR 2018.
Publications
|
|
FroDO: From Detections to 3D Objects
Kejie Li *,
Martin Rünz *,
Meng Tang,
Lingni Ma,
Chen Kong,
Tanner Schmidt,
Ian Reid,
Lourdes Agapito,
Julian Straub,
Steven Lovegrove,
Richard Newcombe,
Computer Vision and Pattern Recognition (CVPR), 2020
|
|
|
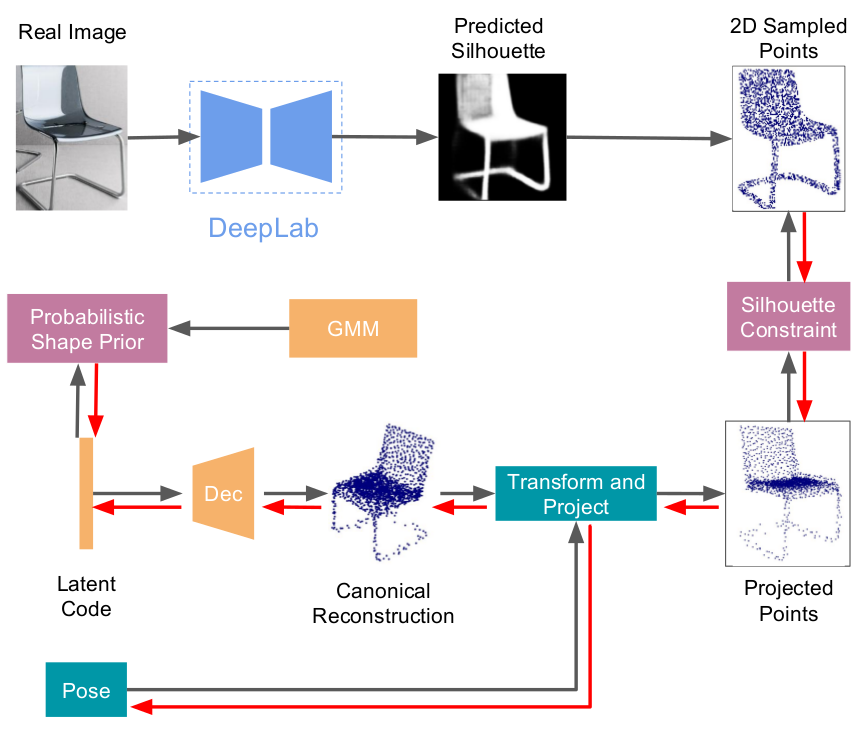
Single-view Object Shape Reconstruction Using Deep Shape Prior and Silhouette
Kejie Li,
Ravi Garg,
Ming Cai,
Ian Reid
British Machine Vision Conference (BMVC), 2019 (oral)
|
|
|
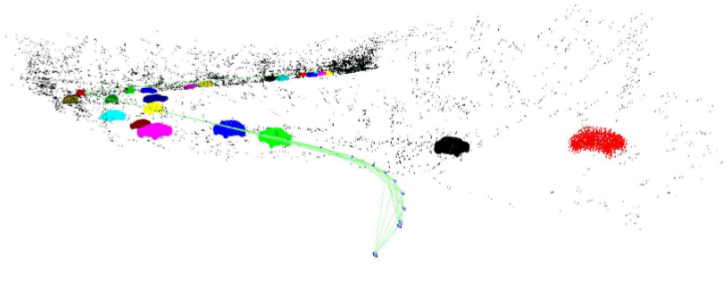
Real-Time Monocular Object-Model Aware Sparse SLAM
Mehdi Hosseinzadeh,
Kejie Li,
Yasir Latif,
Ian Reid
International Conference on Robotics and Automation (ICRA) , 2019
|
|
|
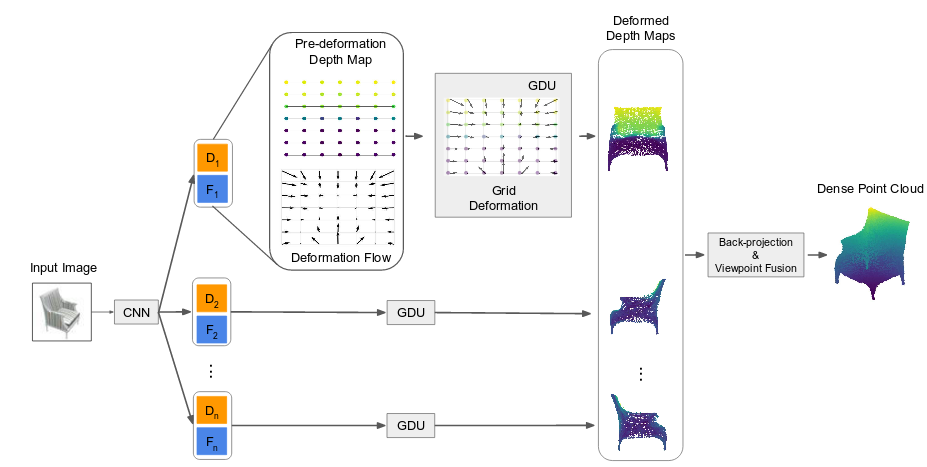
Efficient Dense Point Cloud Object Reconstruction using Deformation Vector Fields
Kejie Li,
Trung Pham,
Huangying Zhan,
Ian Reid
European Conference on Computer Vision (ECCV) , 2018
|
|
|
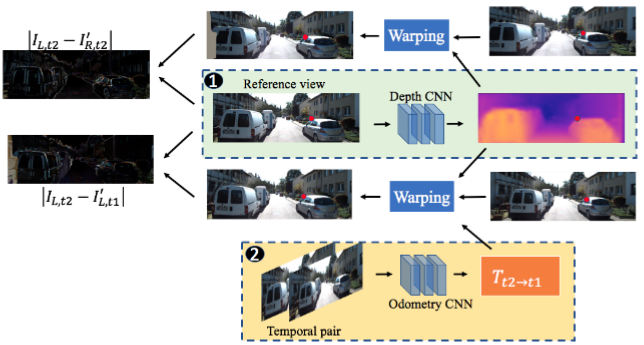
Unsupervised Learning of Monocular Depth Estimation and Visual Odometry with Deep Feature Reconstruction
Huangying Zhan,
Ravi Garg,
Chamara Saroj Weerasekera,
Kejie Li,
Harsh Agarwal,
Ian Reid
Computer Vision and Pattern Recognition (CVPR), 2018
|
Professional Activity
Journal Reviewer
RA-L
Conference Reviewer
CVPR: 2019, 2020
ECCV: 2020
ICCV: 2019
ICRA: 2019
IROS: 2020
|